
STRATOVISION - ストラトビジョン(代表:河野 紘基)は、高知工科大学 山本 真行 教授、成蹊大学 枝本 雅史 助教と共同で気象観測用気球を用いる実験を2024年11月に宮崎県延岡市で実施しました。
本実験ではストラトビジョンが開発した「STRVSN-002型」滑空回収ユニットを気球に搭載。上空4500mに上昇した気球から切り離しを行い、パラフォイルによる滑空および誘導制御による装置回収を行いました。
結果としてプロジェクトとして初となる、地上からの遠隔制御を伴った搭載装置の回収に成功し、「滑空回収型気球観測システム(特許取得済)」の技術的実現可能性を実証しました。

Index
気象観測気球とは
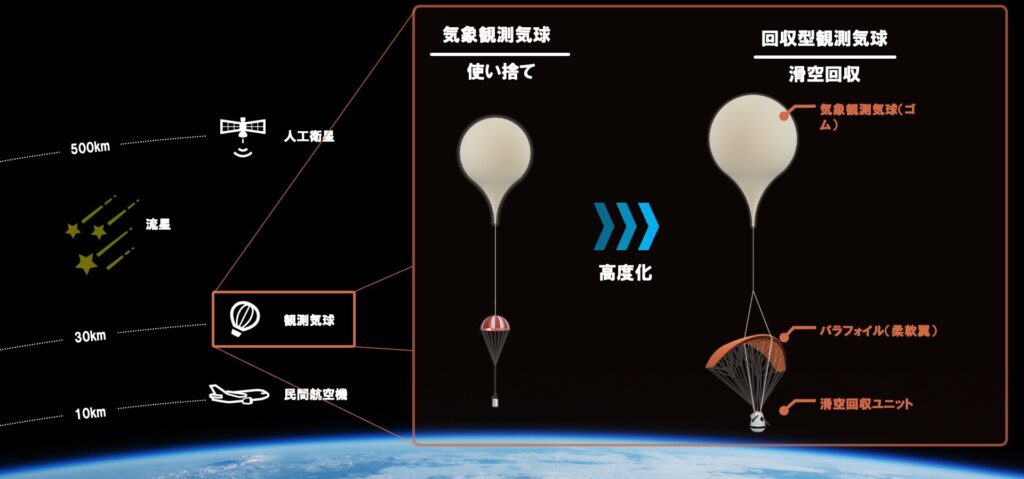
気象観測気球(ラジオゾンデ)はヘリウムガスや水素などを充填した小型のゴム製気球を用いる低コストな上空観測の手段として、世界で一日に約2600個が放球されており、毎日の気象予報や近年では気候変動のモニタリングなどに使用される重要な社会インフラとして運用されています。
気球には、通常簡素なパラシュートを付した数十から数百グラムの小型軽量のセンサーが取り付けられており、上空の気温や風向風速等を観測したのち地上や海上に降下し、多くは使い捨てとなっています。
無制御のパラシュートを降下時に用いるため、安全のために観測装置自体の重量を増やすことができず、また装置回収を目的とした観測をしようとすると落下地点の分散をカバーするための広大な安全マージンの設定が必要となり、装置の捜索・回収コストが増加しやすい傾向があります。このため気球自体が低コストであっても搭載ペイロードを拡張しにくいというジレンマがありました。
そのような中で、近年の急速な気候変動や気象現象等の詳細な把握・解析ニーズに対して、対流圏〜成層圏のその場観測(in-situ observation)データを供給する気球に対しての技術的要求が高まってくることが考えられ、また「その場観測」に対する人工衛星等の「遠隔計測(Remote sensing)」の精度向上・補完を担う役割としても、より搬送性能が高く回収コストの低い新たな気球観測手法の実現が求められてくると考えています。
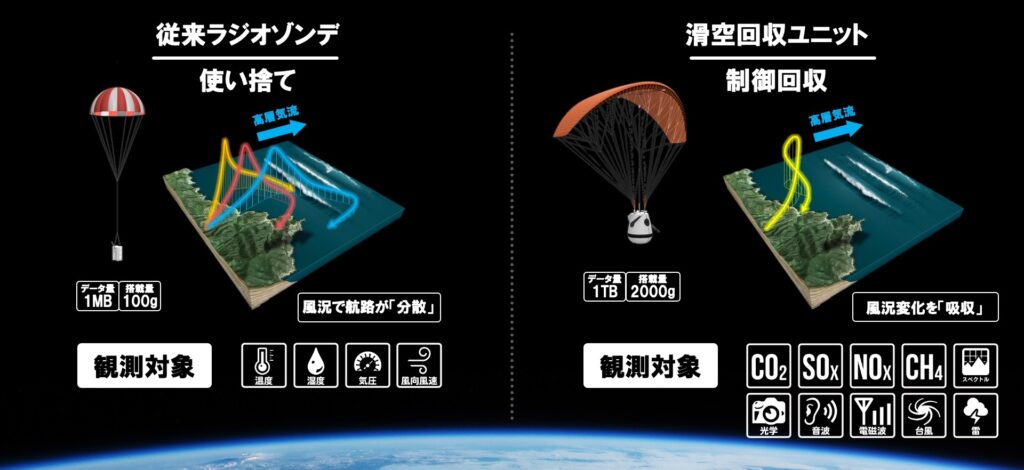
| 従来気象観測気球 | 滑空回収型気球観測システム | |
|---|---|---|
| 運用コンセプト | 基本的に使い捨て | 回収・再利用 |
| 回収用装置 | パラシュート | パラフォイル |
| 搭載ペイロード | 軽量のセンサー類 (数十~数百グラム) | 高度な観測装置類(〜数キログラム) |
| 降下時の制御 | 原理的に困難 | 滑空移動と降下方向の制御が可能 |
滑空回収型気球観測システムについて
従来の気象観測気球の搭載ペイロードの制限や回収コストに対する課題を解消する手段として、ストラトビジョンでは「滑空回収型気球観測システム」を開発してまいりました。これは従来のパラシュートに代わり、滑空と誘導制御が可能なパラフォイルを使用することで搭載ペイロード重量を拡張し、回収コストの飛躍的な低減を図るものです。
2020年末にはストラトビジョンにて初の気球放球・切り離し実験(STRVSN-001型)を行い、高度5934m、冬季の強い偏西風中(水平移動速度140km/h)での気球からの安定的な切り離しと搭載装置の回収に成功しましたが、パラフォイルが失速状態から回復できず、滑空および制御を伴う回収には至りませんでした。
この滑空の安定性に関する課題を解決するため、2022年から2年間、計5回にわたる地上係留ドローンを使用した低高度滑空試験を実施してまいりました。このたびの気球実験は、これらのドローン実験によって得られたデータから一歩ずつシステムの改良・改善を行ってきた中での「再挑戦」の位置づけとなりました。
実験結果(速報値)
今回実験では、無人の小型気象観測気球から滑空可能な観測ユニットを正常に分離し、パラフォイルによって旋回および直進の制御を行うことで目標地点に向けた滑空誘導が行えることを確認しました。一方で、高高度での通信の不安定性や、搭載電子コンパスの信頼性低下、前面部カメラの動作不良のトラブルが複合し、目標方位角への追従に時間を要したことからピンポイントでの誘導着陸には至っていません。
機体は最終的に高度4.5kmから17.6km(速報値)におよぶ長距離を滑空し、着水時には降下速度1~2m/s、対気速度7m/s前後の安定した滑空状態で海水面に着水。その後船舶によって回収されました。
さらに今回の気球実験では、ストラトビジョンにて独自に開発を行った超小型の超音波式対気速度センサー(ULSA BASIC同等品)を初めて投入し、高度4500mの低気圧環境からの降下において対気速度計測にエラーを生ずることなく、常時モニタリングを行いながら滑空制御を実施することに成功しました。得られたデータは今後のさらなる高高度化に向けた対気速度センサーの開発や超音波式風速計ULSAシリーズの高性能化に活用されます。
なお本実験の詳細な成果についてはさらなる解析と検証を行い、今後学会発表や学術論文の形で報告する予定です。
まとめ
ストラトビジョンでは滑空回収の技術的実現可能性を示すことを目的として開発および実験を行ってまいりましたが、いくつかの部分的な課題は残るものの、改良の末にたどり着いた機体・翼構造が過酷な上空環境で動作し得ることを確認し、滑空回収型気球観測システムという新しい技術的コンセプトが十分に実現可能であることを実証する結果になったと考えています。
本結果は代表河野が高知工科大学において2010年に個人的に気球システムの開発を始めて14年、高知工科大学宇宙地球探査システム研究室における滑空回収コンセプトの研究開始(枝本モデル→河野モデル→平塚モデル)から9年という極めて長期間にわたる研究活動の継続の成果・マイルストーンとなりました。
一方、本実験の実証はストラトビジョンとしての活動をスタートした2020年度中に達成を目指したものであり、結果としては目標から4年遅れた形になります。
本プロジェクトの遂行にあたっては、高知工科大学 山本 真行教授、平塚 丘将 氏(博士課程学生)、成蹊大学 枝本 雅史 助教をはじめとして、ストラトビジョンとしての本格的な気球システム開発をスタートするきっかけとなったIPA未踏アドバンスト事業のプロジェクトマネージャー、ビジネスアドバイザー、事務局のみなさま、そして猛暑、極寒の中での2年間にわたるドローン実験に幾度もご協力の手を差し伸べてくださったみなさま、気球実験実施に際して快くご対応いただいた、自治体、空港事務所、海上保安署をはじめとする行政のみなさま、船舶回収にご協力いただいた漁業協同組合のみなさま、本プロジェクトにご協力いただいたすべてのみなさまに深く御礼を申し上げます。
※一連の実験は関係省庁への照会のうえ、関係法令を遵守し、必要な申請等を行ったうえで実施しました。
ギャラリー





STRATOVISION - ストラトビジョンについて
ストラトビジョンは2020年8月にスタートした代表河野 紘基による気球開発の個人プロジェクト。IPA未踏アドバンスト事業採択をきっかけに大学時代から行っていた観測気球システムの社会実装に向けて活動を開始。
外部からの出資や借入れを一切受けない完全自己資金で活動し、2022年には持続的な活動資金を得るために、滑空回収ユニットの対気速度を計測することを目的として独自に開発した「世界最小・最軽量クラスの超音波式風速計ULSAシリーズ」を一般向けに発売。ULSAシリーズは大手企業、大学等研究機関をはじめとする数十社に続々と導入され、気球開発を支えるバックボーンとして成長している。
開発経緯
2010年:アメリカの学生が気球を使って高高度からの地球を撮影した写真に感銘を受け、上空気流の激しさや国土の制約から特に気球運用が困難な日本に最適化された気球システムの独自開発を目指す。
2014年:自身で開発した100km級の通信を可能とする通信・GUI地上管制システムを備えた気球ペイロードの放球と回収に成功。本テーマにてSGEPSS(地球電磁気・地球惑星圏学会)オーロラメダル受賞 [1]、JpGU(日本地球惑星科学連合)学生優秀発表賞を受賞 [2]。
同年:新たな回収コンセプトとしてパラフォイルを有する気球搭載ペイロードの研究を開始(枝本モデル [3])。
2015年:低高度における短時間の滑空と旋回性能を確認(河野モデル [4])。
2016年:電機メーカーに在職しつつ平塚丘将氏と共同で開発を継続 [5]。
2020年:IPA未踏アドバンスト事業への採択 [6]をきっかけとしてストラトビジョンをスタート。STRVSN-001型による初の気球放球実験を行い、冬季偏西風中での切り離しと装置回収に成功するも、滑空には失敗。
2022年:課題特定のための低高度滑空試験を開始。
2024年:5回にわたる低高度滑空試験を経て、2024年11月に初の滑空回収に至る。
参考文献・リンク
[1] SGEPSS(地球電磁気・地球惑星圏学会)第134回講演会「小型気球搭載を目的としたテレメトリと簡易運用システムの基礎開発」 (R005-P015)
[2] JpGU(日本地球惑星科学連合)2014年大会「小型気球搭載を目的としたテレメトリおよび簡易運用システムの基礎開発」
[3] 枝本雅史, 「パラフォイルを用いた小型飛翔体自律誘導システムの基礎開発」, 高知工科大学卒業研究報告, 2015年.
[4] H. Kono, M. Edamoto, Y. Kakinami and M. Yamamoto, TRANSACTIONS OF THE JAPAN SOCIETY FOR AERONAUTICAL AND SPACE SCIENCES, 14, ists30, Pk_103-Pk_110.
[5] 平塚丘将, 河野紘基, 山本真行, 「超小型気球の回収に最適化された制御降下式ペイロードシステムの開発と飛行試験結果の評価」, 宇宙航空研究開発機構研究開発報告, JAXA-RR-16-008, pp. 81-100, 2017年.